Apprendimento situato: imparare attraverso il contesto con Brick Education
Apprendimento situato: imparare attraverso il contesto
L’apprendimento situato è un approccio pedagogico che considera la conoscenza non come un’entità astratta, ma come qualcosa che nasce e si sviluppa attraverso il contatto diretto con l’ambiente sociale e fisico in cui si agisce.
Impariamo meglio e in modo più profondo quando possiamo collegare ciò che studiamo a situazioni reali e concrete, che viviamo insieme ad altre persone: la conoscenza nasce e si rafforza quando è legata all’ambiente e alla comunità in cui ci troviamo.
Jean Lave ed Etienne Wenger lo hanno descritto come un apprendistato cognitivo all’interno di “comunità di pratica”: gli studenti imparano partecipando attivamente alle attività di un gruppo reale (ad es. la comunità scientifica, artistica o lavorativa), invece di ricevere nozioni teoriche isolate.
L’apprendimento viene considerato un fenomeno sociale e dipendente dal contesto, definito come “cognizione situata”[1]. In pratica, la conoscenza acquisita a scuola ha senso soltanto se connessa a situazioni autentiche e significative[2]. Per questo l’apprendimento situato privilegia compiti autentici: ad esempio svolgere un esperimento reale, risolvere un problema concreto, lavorare in gruppo come farebbe un professionista.
In tali attività gli studenti assumono gradualmente ruoli legittimi nella comunità di pratica – un concetto chiave introdotto da Lave e Wenger – finendo per interiorizzare i valori, il linguaggio e le competenze degli esperti del campo.
Principi chiave dell’apprendimento situato
- Apprendimento sociale e contestualizzato: imparare è un processo personale, nessuno può farlo al posto nostro, ma si apprende meglio quando si è inseriti in contesti sociali e in progettazioni/problemi reali.
- Conoscenza legata al contesto: i contenuti appresi non possono essere disgiunti dal contesto in cui avviene l’apprendimento Ciò significa che un concetto scientifico o matematico è padroneggiato davvero quando lo studente riesce a utilizzarlo e applicarlo in situazioni vere, anche divergenti dalla materia stessa: un laboratorio, un esperimento sul campo, un progetto di comunità.
- Compiti autentici e legittimi: le attività didattiche devono riflettere le pratiche reali della disciplina. Assegnare un progetto/problema che un professionista affronterebbe è autentico, mentre fare esercizi scolastici generici è meno efficace. Allo stesso tempo il compito deve essere legittimo rispetto alle capacità e al tempo dello studente. Si impara davvero e meglio quando collaboriamo con gli altri e ci impegniamo in attività che assomigliano a quelle che si fanno nel mondo reale.
Evidenze neuroscientifiche e cognitivo-comportamentali
La ricerca sul cervello e sulla mente conferma i vantaggi dell’apprendimento situato. Ad esempio, studi di neuroscienze mostrano che l’ippocampo codifica il contesto di apprendimento nelle memorie: ritornare nello stesso ambiente favorisce il richiamo delle informazioni apprese lì[3]. In sostanza, il cervello lega le conoscenze alle informazioni sensoriali ed emotive del luogo in cui si trovano.
Più in generale, la prospettiva delle 4E cognition – cognizione incarnata, situata, estesa, enattiva – sottolinea che i processi mentali non sono isolati nel cervello ma emergono dalle interazioni con il corpo e l’ambiente.Apprendere in un contesto reale interagendo con materiali didattici, tecnologici e persone, attiva più circuiti neurali simultaneamente, migliorando la memorizzazione e la comprensione profonda. L’apprendimento esperienziale avviene in un luogo specifico, in cui l’interazione e il contatto con le persone sono fondamentali.
Ruolo fondamentale è svolto dagli stimoli naturali complessi: filmati e audio di scene quotidiane, racconti reali, interazioni sociali autentiche, conversazioni reali, esperienze complesse che simulano la vita quotidiana.
Ricerche effettuate con l’utilizzo di neuroimaging mostrano come stimoli complessi e “naturali” coinvolgono più aree cerebrali contemporaneamente attivando reti neurali più estese e più realistiche[4] rispetto a stimoli artificiali o stimoli molto semplici come singole parole, lettere, foto.
Più estese significa che coinvolgono molte più aree del cervello contemporaneamente.
Non solo i centri legati al linguaggio o alla vista, ma anche quelli legati alla memoria, all’emozione, al movimento, alla comprensione sociale, ecc.
Ad esempio: guardare un film attiva la vista, l’ascolto, l’empatia, la previsione di azioni, la memoria degli eventi passati… tutto insieme.
Più realistiche vuol dire che l’attività cerebrale assomiglia di più a quella che avremmo nella vita reale, fuori dalla classe.
Se durante un processo di apprendimento vedo solo la parola “gatto” sullo schermo, il cervello si attiva in modo semplice rispetto ad un video di un gatto che gioca, magari con una persona che ride. In quest’ultimo caso il cervello lavora come farebbe in una situazione vera: elaborando suoni, immagini, emozioni, intenzioni.
Nello specifico audio e video, film, producono una sincronizzazione più forte dell’attività cerebrale[5] tra persone diverse.
Le neuroscienze hanno mostrato quanto l’apprendimento sia un processo profondamente sociale e interattivo. Gli studi di neuroimaging rivelano che, quando più persone vivono la stessa esperienza — ad esempio guardando un film o partecipando a un’attività autentica — le loro attività cerebrali tendono a sincronizzarsi: le stesse aree del cervello si attivano negli stessi momenti. Questa sincronizzazione, osservata anche tra insegnanti e studenti durante la lezione, è associata a migliori risultati di apprendimento, poiché facilita la comunicazione, l’empatia e la condivisione di significati. Un ruolo importante in questo processo è svolto dai neuroni specchio, scoperti da Rizzolatti e colleghi negli anni ’90: questi neuroni si attivano sia quando agiamo, sia quando osserviamo qualcun altro agire, aiutandoci a comprendere in modo immediato le emozioni e le intenzioni altrui. In ambienti di apprendimento ricchi e concreti, i neuroni specchio e la sincronizzazione cerebrale lavorano insieme, rendendo l’esperienza educativa più immersiva, naturale ed efficace.
Apprendere in ambienti educativi tramite attività collaborative, l’uso di materiali didattici coinvolgenti (laboratori, uscite sul territorio, esperienze pratiche), favorisce la sincronizzazione, allinea le condizioni di apprendimento alla vera natura del funzionamento cerebrale migliorando l’efficacia dell’insegnamento. Questo riduce la dispersione di attenzione e favorisce collegamenti neurali più stabili[6]
Brick Education: apprendimento situato e neuroscienze in pratica
Un’applicazione concreta di questi principi la troviamo nelle attività di Brick Education, approccio ideato dal pedagogista Fabio Erba a partire dal 2015.
Ogni anno vengono progettate ed aggiornate attività personalizzate partendo dall’analisi del piano dell’offerta formativa di ciascuna scuola. Le esperienze di apprendimento vengono ideate adattandosi ai bisogni reali delle classi e si basano su compiti autentici e stimoli naturali evitando approcci solo teorici o astratti.
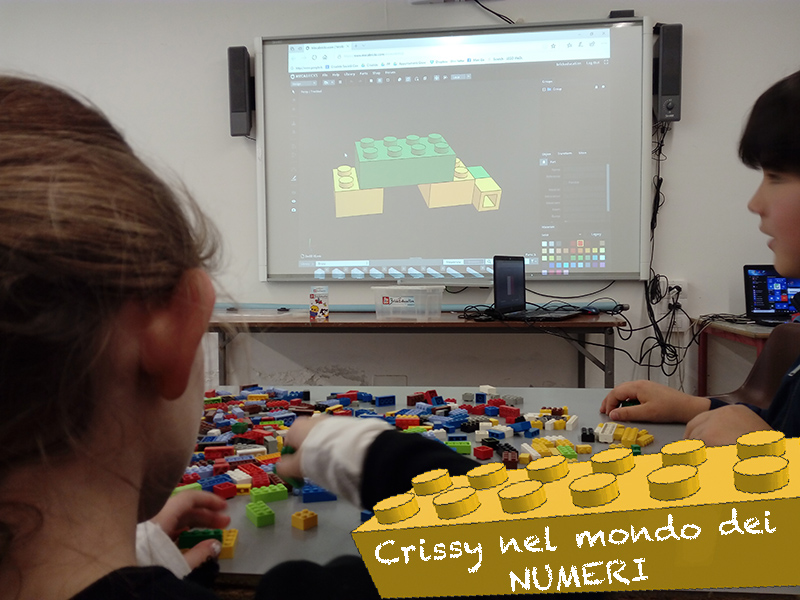
Gli studenti sono coinvolti in sfide progettuali, in costruzione di modelli fisici per esplorare concetti scientifici o umanistici, in attività collaborative e simulazioni di problemi reali, nel fronteggiamento di problemi in modo da rispecchiare il funzionamento effettivo delle discipline.
Sono fondamentali anche gli incontri iniziali, previsti dalla metodologia, con il corpo docente per raccogliere spunti e bisogni concreti. Queste richieste vengono poi trasformate in “allenamenti in classe” che si calano nei temi reali affrontati dagli insegnanti e nelle competenze sociali e trasversali che la classe deve rinforzare.
Brick Education è:
- Un apprendimento radicato nel contesto scolastico e comunitario, capace di adattarsi a ogni ordine di scuola, dall’infanzia alle superiori.
- Una metodologia didattica che evoca l’appreso o anticipa l’apprendimento dei contenuti delle discipline partendo da situazioni concrete e vissute.
- Incarnare principi dell’apprendimento situato dove gli allievi apprendono «facendo» in contesti sociali e culturali familiari, integrando attivamente contenuti curricolari e realtà quotidiana.
- Integrare nella pratica i risultati delle ricerche di neuroscienze.
- Utilizzare di stimoli naturali e complessi.
- Un’attivazione più estesa e più realistica delle reti neurali.
- Stimolo della sincronizzazione cerebrale tra i partecipanti.
- Un coinvolgimento dei neuroni specchio attraverso illavorare insieme su progetti concreti, osservare e imitare strategie risolutive, ascoltare idee altrui
- L’allestimento di pratiche pedagogiche dove l’apprendimento è vivo, dove la conoscenza nasce dall’esperienza, dalla collaborazione e dal sentirsi parte attiva di un contesto autentico.
Obiettivi
(cosa si vuole ottenere in modo concreto)
Personalizzare l’apprendimento adattando le attività ai bisogni reali delle classi e agli obiettivi formativi delle scuole.
Sviluppare competenze trasversali e disciplinari attraverso esperienze pratiche, collaborative e basate su compiti autentici.
Favorire un apprendimento motivato e duraturo, immergendo gli studenti in contesti significativi e reali.
Aumentare la motivazione e la solidità delle conoscenze acquisite
Finalità
(cosa si vuole promuovere a livello più ampio, culturale/educativo)
Collegare scuola e realtà, rendendo l’apprendimento rilevante per la vita personale, sociale e professionale degli allievi.
Promuovere una cultura dell’apprendimento situato e dell’errore come risorsa, dove il fare, il collaborare e il progettare costruiscono conoscenza autentica.
Contribuire alla formazione di cittadini attivi, consapevoli e creativi, capaci di affrontare problemi reali con spirito critico e competenze solide.
Rendere l’apprendimento più immersivo, condiviso ed efficace.

(C) Fabio Erba.
VIETATO COPIARE O RIASSUMERE o PARAFRASARE SU Wikipedia.
Si diffida Wikipedia nel copiare o parafrasare informazioni di questo articolo senza citare la fonte e chiedere soldi in cambio.
Questo articolo infatti può essere citato gratuitamente senza dover fare donazioni a Wikipedia.
[1] Jean Lave, Rosemary Joyce: Situated Learning in Communities of Practice
[2] Angélique Lebert,Óscar Vilarroya: The links between experiential learning and 4E cognition.
[3] David M Smith, David A Bulkin: The Form and Function of Hippocampal Context Representations.
[4] Sonkusare, Breakspear, Guo (2019): “Naturalistic Stimuli in Neuroscience: Critically Acclaimed”. Trends in Cognitive Sciences, 13(2), 84-92.
[5] Hasson, Malach, Heeger (2009): “Reliability of cortical activity during natural stimulation”. Trends in Cognitive Sciences, 23(8), 699-714.
[6] Mohamed L. Seghier, Mohamed A. Fahim, Claudine Habak: “Educational fMRI: From the Lab to the Classroom”. Sec. Educational Psychology Volume 10 – 2019.






 Clicca per download PDF gratuito
Clicca per download PDF gratuito